Lasersensoren
Ein reichhaltiges Sortiment an Lasersensoren zur Ferneinstellung und Differenzierung der empfangenen Lichtintensität. Auf dieser Seite werden kompakte digitale CMOS-Lasersensoren mit eingebauter Auswerteeinheit vorgestellt, die sich durch hohe Lebensdauer und Stabilität auszeichnen. Das Sortiment beinhaltet auch einfach zu bedienende Reflexions- und Lichtschrankenmodelle von Laser-Wegmesssensoren mit einer Vielzahl an Anwendungsmöglichkeiten sowie bildbasierte Lasersensoren.
Empfohlene Artikel
Produktpalette : Abstandsbasierte Sensoren

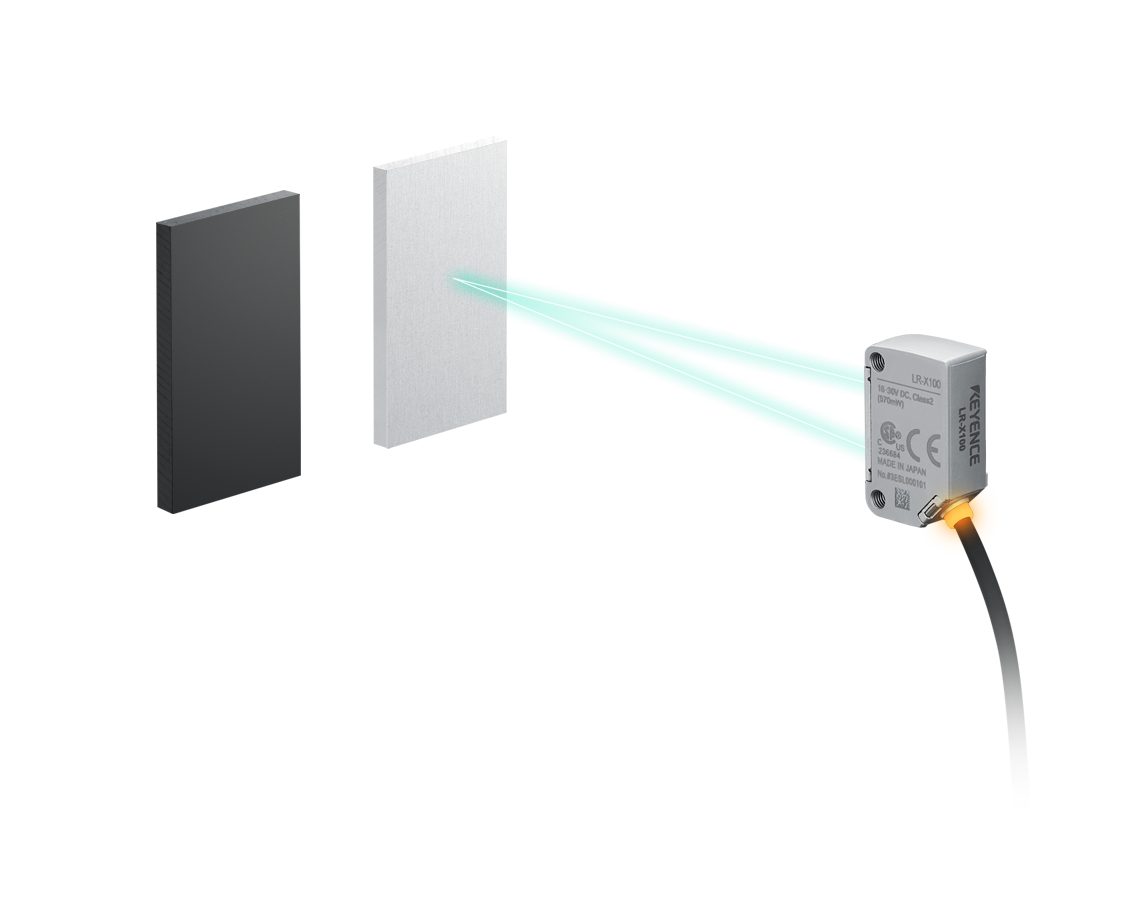
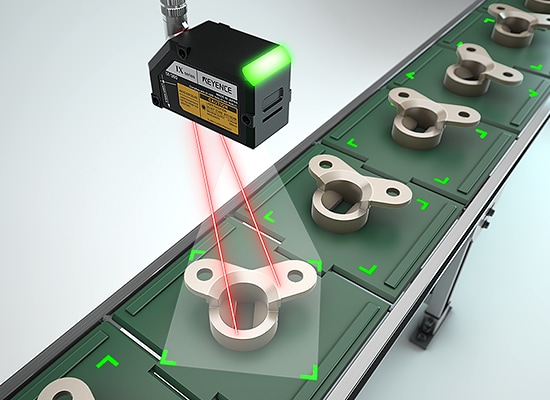
Der Lasersensor der Modellreihe LR-X ist ein sehr kompakter und zugleich robuster Sensor. Durch die abstandsbasierte Erkennung können Zielobjekte unabhängig von Farbe, Oberflächenbeschaffenheit oder Form erkannt werden. Das lebensmitteltaugliche Edelstahlgehäuse (SUS316L), die hohe IP-Schutzklasse sowie das metallummantelte Kabel sorgen für eine beeindruckende Lebensdauer. Erkennbare Höhenunterschiede von nur 0,5 mm sowie eine automatische Anpassung der Lichtintensität gewährleisten eine stabile Erkennung bei verschiedenen Objekten.


Die optischen Sensoren der Modellreihe LR-T können vielseitig installiert werden und erkennen beliebige Objekte unabhängig von Farbe, Material und Oberfläche. Die Lichtlauftzeit-Technologie sorgt für eine stabile Erkennung bei großen Abständen ohne Einschränkungen durch die Materialoberfläche, die Farbbeschaffenheit oder durch den Winkel des Werkstücks. Ein verstellbarer Lichtpunkt gewährleistet eine stabile Erkennung bei unebenen oder netzartigen Oberflächen. Durch den großen Erkennungsabstand von bis zu 5 m kann dieser optische Sensor auch außerhalb von Transportwegen oder Arbeitsbereichen montiert werden. Die optischen Sensoren der Modellreihe LR-T ermöglichen somit eine stabile Erkennung auch bei ausreichend großen Abständen, sodass Schäden durch Zusammenstöße mit Robotern oder ähnlichen beweglichen Maschinenteilen vermieden werden können.



Die Erkennungsstabilität von optischen Sensoren kann je nach Farbe und Oberflächenbeschaffenheit des Objekts variieren. Die optischen Sensoren der Modellreihe LR-Z berechnen den Abstand zum Erkennungsobjekt anhand der Triangulationsmethode. Dies gewährleistet eine stabile Erkennung auch bei komplexen Formen, Farbabweichungen oder wechselnden Oberflächenbeschaffenheiten der zu erkennenden Objekte. Der leistungsstarke integrierte CMOS-Laser bietet einen Erkennungsabstand von bis zu 500 mm.




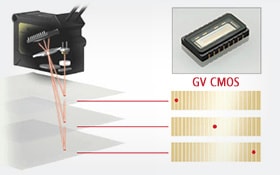
Die GV Lasersensoren erkennen Abstandsänderungen bis zu 0,5 mm und sind dabei unbeeinflusst durch Farbe oder Material des zu erkennenden Objekts.
Produktpalette : Intensitätsbasierte Sensoren

Die Modellreihe LV-N bietet durch die NEO-Preset-Funktion, eine einfache Möglichkeit zeitsparend Einstellungen an der Auswerteeinheit vorzunehmen. Durch die Kombination aus platzsparender Auswerteeinheit und der Kommunikationseinheit NU stehen vielfältige Funktionen und Einsatzmöglichkeiten zur Verfügung. Damit wird wiederum eine hervorragende Bedienbarkeit gewährleistet. Sämtliche Sensoren der Modellreihe NEO können miteinander kombiniert werden. Somit ist eine große Auswahl auch an Lichtleitern FS-N und photoelektrischen Sensoren PS-N vorhanden. Die Produktpalette der LV-N Laserköpfe umfasst sowohl Lichtpunkt- als auch Flächentypen für den reflektierenden Typ, den retro-reflektierenden Typ und das Lichtschrankenmodell. Jedes Modell verfügt außerdem über Variationen wie kompaktes Gehäuse, großen Abstand, sehr kleinen Lichtpunkt und hohe Leistung, die je nach Anwendung und Bedingungen ausgewählt werden können. Je nach Anschlussart stehen vier verschiedene Auswerteeinheiten zur Auswahl.



Die LV-S Lasersensoren bieten kompakte Sensorköpfe für vielfältige Anwendungen.

Die LV Lasersensoren bieten eine große Auswahl an Lichtschranken, reflektiven und retro-reflektiven Modellen.
Produktpalette : Laser-Distanzsensoren

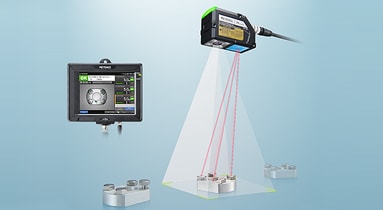
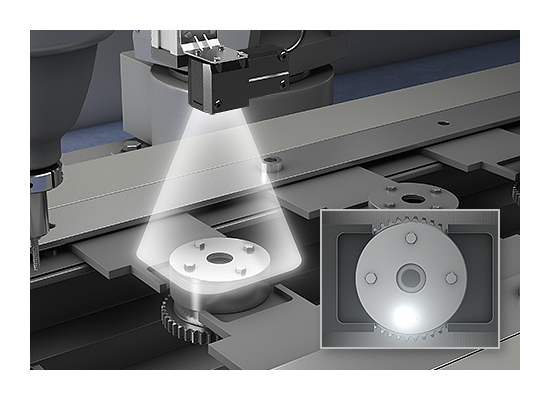
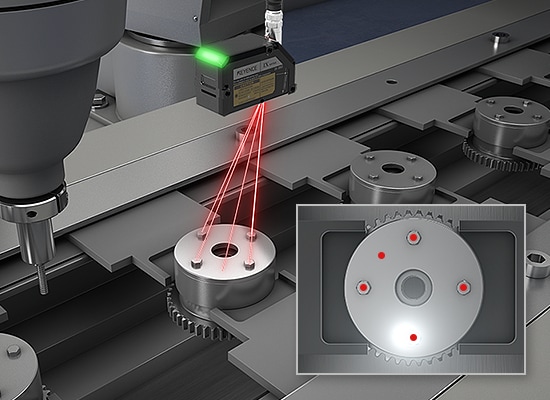
Mit dem bildbasierten Höhenvergleichssensor der Modellreihe IX kann eine Höhenmessung überall innerhalb des Erkennungsbereichs durchgeführt werden. Dank der kamerabasierten Bilderkennung kann die Höhe der Messpunkte auch dann erfasst werden, wenn Prüfobjekte nicht perfekt auf der Fertigungslinie ausgerichtet sind. Die Höhe, in der der Laser auf das Prüfobjekt trifft, variiert bei Neigung oder Verkippung des Prüfobjekts. Die Modellreihe IX kann jedoch den Höhenunterschied zu einem Referenzpunkt erkennen. In einer Fertigungslinie kann mit einem einzigen Höhenvergleichssensor der Modellreihe IX nicht nur die Anwesenheitskontrolle von Bauteilen, sondern auch Sitzprüfungen und andere höhenbasierte Inspektionen durchgeführt werden. Dank der Erkennung von Höhenunterschieden bietet die Modellreihe IX auch bei Reflektion durch glänzende Metalloberflächen oder wenn der Messpunkt die gleiche Farbe wie der Hintergrund hat, eine stabile automatische Inline-Differenzierung und ist damit frei von Erkennungsfehlern.

Multi-Funktions-CMOS-Analoglasersensoren der Modellreihe IL sind Reflexions-Laser-Wegmesssensoren, die ein sehr hohes Erkennungsvermögen und hohe Stabilität zu einem ausgezeichneten Preis-Leistungs-Verhältnis bieten. Eine stabile Erkennung ist ohne Anpassung an dem Prüfobjekt oder dessen Oberflächenbeschaffenheit möglich, so dass die Modellreihe IL in Fertigungslinien integriert werden kann, um das Einrichten, Umrüsten und Produktwechsel zu erleichtern. Mit einer breiten Palette an Messköpfen, einschließlich hochpräziser Modelle und Modelle mit großer Reichweite (bis zu 3,5 m), können diese Lasersensoren dank ihres großen Dynamikbereichs und ihrer Umweltbeständigkeit in verschiedenen Anwendungen eingesetzt werden. Die Wiederholgenauigkeit von 1 μm ermöglicht den Einsatz in Messumgebungen mit geringen Toleranzen, die bisherige Sensoren nicht zuverlässig gewährleisten konnten.
Bei diesem Sensortyp dient eine Laserdiode als Sender. Laser haben einen gerichteten Lichtstrahl, dadurch kann am sichtbaren Lichtpunkt der Sensor mühelos ausgerichtet und positioniert werden. Durch die vorhandene Fokussierung des Lasers spielt Streustrahlung kein Rolle. Zu den wichtigsten Arten von Lasersensoren gehören reflektierende sowie retro-reflektierende Typen und Lichtschrankenmodelle.
Erkennungsprinzipien und Grundmodelle von Lasersensoren
Lasersensoren werden im Wesentlichen in Intensitätsbasierte Typen und Abstandsbasierte Typen unterteilt. Die Intensitätsbasierten Typen werden desweiteren unterteilt in reflektierende, retro-reflektierende und Lichtschrankenmodelle. Alle Modelle verwenden einen sichtbaren Laserstrahl, jedoch sind ihre Funktionsprinzipien zur Erkennung unterschiedlich. In diesem Abschnitt werden diese Modelle und ihre jeweiligen Erkennungsprinzipien anhand von Abbildungen erläutert.
Intensitätsbasierende Lasersensoren
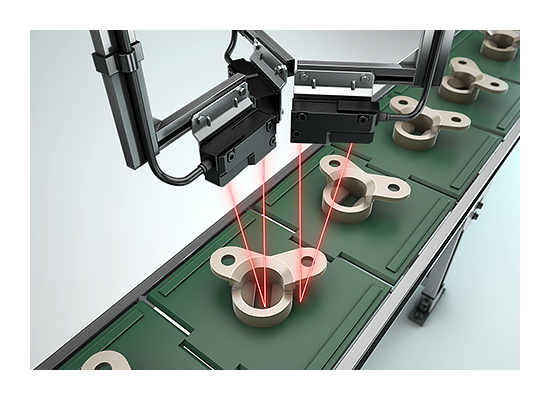
Reflektierende Lasersensoren:
Der Sensorkopf besteht aus einer Laserlichtquelle (Sender) und einem Lichtempfindlichen Element (Empfänger). Zur Objekterkennung sendet der Sensor einen Laserstrahl aus, dieser wird an der Objektoberfläche reflektiert und im Empfänger ausgewertet. Auf diese Weise wird erkannt ob ein Objekt vorhanden ist oder eben nicht.
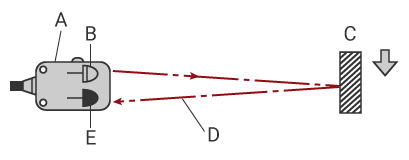
A: Sender/Empfänger (Sensorkopf), B: Laserlichtquelle, C: Objekt, D: Reflektiertes Licht, E: Lichtempfindliches Element
Lichtschranken Lasersensoren:
Bei diesem Erkennungsprinzip stehen sich Sender (Laserlichtquelle) und Empfänger (Lichtempfindliches Element) in einer optischen Achse gegenüber. Der Sensor erkennt das Objekt, wenn es den Laserlichtstrahl vom Sender zum Empfänger unterbricht.
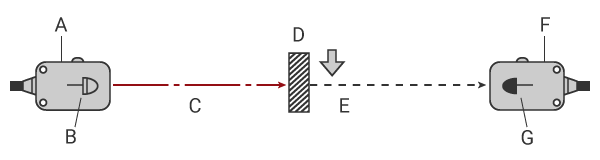
A: Sender, B: Laserlichtquelle, C: Laserlichtstrahl, D: Objekt, E: Laserlichtstrahl unterbrochen, F: Empfänger, G: Lichtempfindliches Element
Retro-reflektierende Lasersensoren:
Bei diesem Erkennungsprinzip sind Sender und Empfänger in einem Sensorkopf enthalten. Mit Hilfe eines Reflektors wird der ausgesendete Laserstrahl zum Empfänger zurück reflektiert und ausgewertet. Wird der Laserstrahl durch ein Objekt unterbrochen, kommt kein Licht am Empfänger an und wird dadurch erkannt.
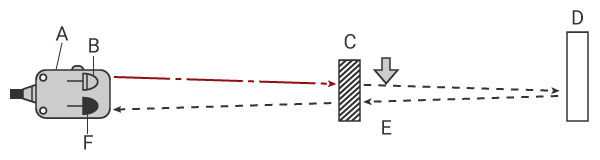
A: Sender/Empfänger (Sensorkopf), B: Laserlichtquelle, C: Objekt, D: Reflektor, E: Laserlichtstrahl unterbrochen, F: Lichtempfindliches Element
Abstandsbasierte Lasersensoren
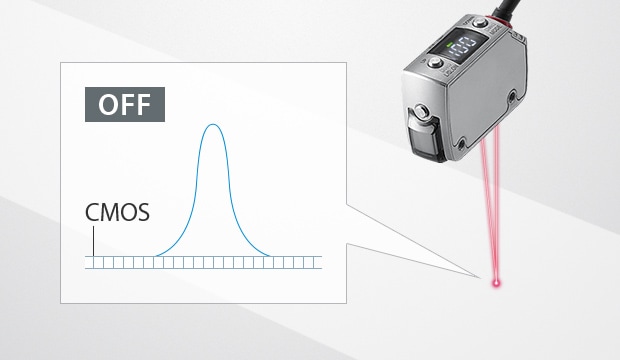
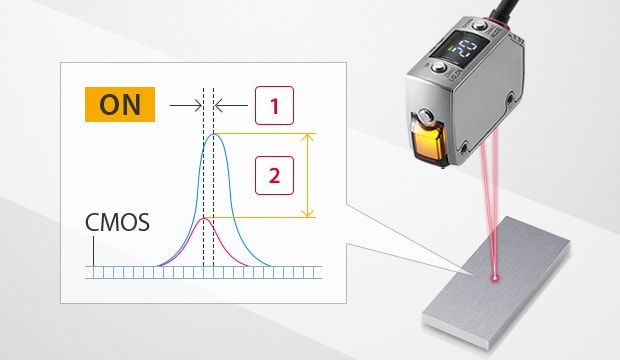
Dieses Lasersensormodell besteht aus einer Laserlichtquelle, einer optischen Linse und einem lichtempfindlichen Element (CMOS) im Sensorkopf. Der Sensor sendet einen Laserstrahl zum Objekt und wertet das reflektierte Licht aus. Anhand der Änderung der Position des empfangenen Lichts auf dem CMOS (Lichteintrittswinkel), kann der Sensor die Änderung der Entfernung zum Objekt (Höhe oder Position des Objekts) erkennen. Bei diesem Prinzip bildet der Weg des Laserstrahls vom Sender über den Reflexionspunkt an der Objektoberfläche bis zurück zum Empfänger ein Dreieck. Daher wird diese Methode auch Triangulation genannt.
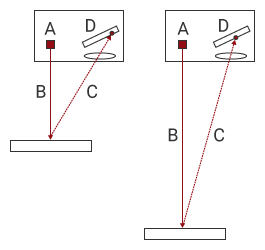
Links: Das Objekt ist nah, rechts: Das Objekt ist weiter entfernt
A: Laserlichtquelle, B: Objektoberfläche, C: Reflektiertes Laserlicht, D: Lichtempfindliches Element (CMOS)
Vorteile von Lasersensoren
Das Licht einer Laserlichtquelle wird im Gegensatz zu einer LED gebündelt ausgesendet und bildet somit einen geraden Lichtstrahl. Da das Licht sichtbar ist, kann der Lichtpunkt leicht erkannt werden. Bei reflektierenden Lasersensoren kann dadurch die Position auf dem Objekt sichtbar gemacht werden um eine optimale Positionierung für die Erkennung zu gewährleisten. Bei Lichtschranken-Lasersensoren kann die Installation schnell und genau durchgeführt werden, da die optische Achse einfach auszurichten ist und die Erfassungsposition problemlos bestimmt werden kann. Daraus ergeben sich Vorteile wie beispielsweise ein geringerer Installationsaufwand und präzisere Installation.
Lasersensoren senden ein stark gebündeltes Licht aus, das selbst über große Entfernungen nicht streut. Das bedeutet, dass eine Erkennung auch weit vom Sensorkopf entfernt möglich ist. Selbst wenn der Sensor z. B. in größerer Entfernung montiert werden muss (Roboterzellen, manuelle Eingriffe, hohe Temperaturen, spritzende Chemikalien usw.), ermöglicht der kleine Lichtpunkt die gewünschte Erkennung. KEYENCE bietet außerdem eine Vielzahl von Sensorköpfen an, die unter verschiedenen Installationsbedingungen eingesetzt werden können, darunter auch Typen mit variablen Lichtpunktgrößen und Typen, die besonders für einen großen Erkennungsabstand geeignet sind.
Sensoren mit LED-Lichtquellen sind empfindlich gegenüber Störungen durch Streulicht. Wenn diese Sensoren auf engem Raum im Inneren von Anlagen eingebaut sind, kann es durch unerwartete Reflexionen zu fehlerhaften Erkennungen kommen. Laserstrahlen erzeugen auch bei engen Platzverhältnissen kein Streulicht. Sie breiten sich in gerader Linie aus und ermöglichen so eine Erkennung mit kleinem Lichtpunkt. Man kann reflektierende Lasersensoren auch innerhalb von Anlagen installieren, um Objekte zu erkennen, oder Lichtschranken-Lasersensoren verwenden, um Lücken zu erkennen und zu überwachen. KEYENCE bietet eine breite Produktpalette an kompakten Sensorköpfen, die entsprechend den Einbaubedingungen ausgewählt werden können.
Anwendungsbereiche von Lasersensoren
Erkennung der verbleibenden transparenten Folienrolle
Die verbleibende Folienmenge wird mit einem Laserstrahl erfasst, der auf die Seite der Folienrolle gerichtet ist. Bei Rollenmaschinen und automatischen Verpackungsmaschinen sorgt dies für die rechtzeitige Zuführung neuer Folie (Grundmaterial) und verhindert somit Stillstände. Die KEYENCE-eigenen Lasersensoren (LR-ZH) verfügen über die U.C.D.-Funktion (Universal Change Detection), die die verbleibende Menge an transparenter Folie erkennen kann. Wenn kein Hintergrund vorhanden ist, kann die Rolle in Kombination mit einem dahinter angebrachten Reflektor erkannt werden.
Erkennung bei großem Abstand zum Überprüfen der Gewebespannung
Die Installation eines abstandsbasierten Lasersensors (Laser-Wegmesssensor) ermöglicht eine konsistente Regelung während des Transfers einer Folien- oder Gewebebahn. KEYENCE bietet eine breite Produktpalette an Laser-Wegmesssensoren mit sehr großer Reichweite, die selbst bei Entfernungen von bis zu 3500 mm eine genaue Erkennung ermöglichen. Diese Entfernung bietet flexible Einbaumöglichkeiten und sorgt für eine stabile Erkennung, ohne dass der Bediener in Gefahr gerät.
Verwendung eines bildbasierten Höhenvergleichssensors zur Erkennung der Höhe von Teilen und Materialien
Der bildbasierte Höhenvergleichssensor der Modellreihe IX kann gleichzeitig die Höhe an mehreren Punkten sowie das Vorhandensein von Teilen und Materialien erkennen, ohne durch Positionsabweichungen eines Objekts beeinflusst zu werden. Der Sensor kann bis zu 16 Punkte innerhalb des Bildfeldes von 108,5 × 81 mm erkennen. Neben der Anwesenheitserkennung von mehreren Schrauben an Fahrzeugteilen kann durch die Höhendifferenzierung mittels Laser auch gleichzeitig eine falsche Schraubenhöhe überprüft werden. Die Kamera kann die Merkmale des Objekts speichern. Auch wenn das Objekt anders platziert ist, wird die Position im Bildbereich korrigiert und es können genaue Punkte erkannt werden. Da die Erkennung auf der Differenz zwischen der Referenzhöhe und der Höhe des Objektpunktes basiert, können sowohl eine Neigung des Objekts als auch falsche Teilehöhen erkannt werden. Dies ist sogar möglich, wenn die Objektteile die gleiche Farbe haben, wie z. B. Karosserierahmen und schwingungsdämpfendes Material.

Die "Sensor Basics"-Website beschreibt die Funktionen einer Vielzahl von Sensoren und deren Vorteile in einer Produktionsumgebung. Auf dieser Website finden Sie alles von Grundlagenwissen wie Typen und Mechanismen bis hin zu Fehlersuche und Anwendungsbeispielen.
Häufig gestellte Fragen zu Lasersensoren
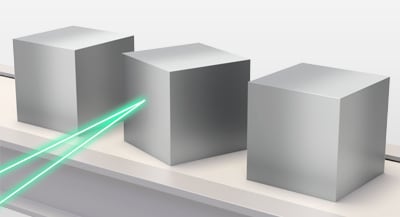
Wenn Umgebungslicht, wie z. B. das Licht einer gepulsten Inverter- oder Leuchtstofflampe, in den Empfänger eines Lasersensors einfällt, kann der Sensor es fälschlicherweise als Reflexion des von ihm ausgesandten Lichts werten. Um dieses Problem zu vermeiden, installieren Sie eine Abschirmung zwischen dem Empfänger des Sensors und der Quelle des Umgebungslichts, damit der Sensor das Umgebungslicht nicht empfängt. Stellen Sie alternativ den Winkel des Empfängers so ein, dass das Umgebungslicht nicht direkt einfallen kann. Sorgen Sie außerdem für einen möglichst großen Abstand zwischen der Quelle des Umgebungslichts und dem Empfänger. In einigen Fällen kann die Verwendung einer Gleichstromlichtquelle zu geringeren Sensorfehlschaltungen führen.
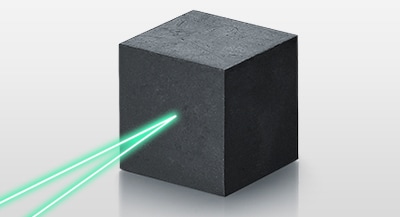
Transparente Objekte haben eine hohe Lichtdurchlässigkeit. Es ist nicht ungewöhnlich, dass die Anwesenheitserkennung von transparenten Objekten aufgrund eines zu geringen Unterschieds in der empfangenen Lichtintensität fehlschlägt. Manchmal kann sich eine geringfügige Änderung der empfangenen Lichtintensität, wie z. B. durch die Position des Reflektors, negativ auf die Erkennung auswirken. Um dieses Problem zu lösen, montieren Sie den Sensor in Bezug auf die Einfallsrichtung des Laserstrahls am besten abgewinkelt zum transparenten Objekt und nicht lotrecht zur optischen Achse. Durch das Abschrägen wird die Strahlfläche vergrößert und es werden vom Empfänger weniger Spiegelreflexionen des zu erkennenden Objekts empfangen. Dies sollte zu Verbesserung der Erkennung des Objekts führen. Wenn Sie ein retro-reflektierendes Modell verwenden, können Sie durch die Wahl eines Typs mit großem Lichtpunkt die durch die Reflektorposition verursachte Variation der reflektierten Lichtmenge verringern. Wenn geringste Unterschiede in der Lichtintensität erkannt werden müssen, erlaubt die Verwendung eines Modells mit separater Auswerteeinheit eine visuelle Darstellung der empfangenen Lichtintensität, was die Einrichtung vor Ort erleichtert. Die Verwendung einer Auswerteeinheit mit einer Funktion zur automatischen Korrektur der eingestellten Lichtintensitätswerte könnte ebenfalls hilfreich sein.
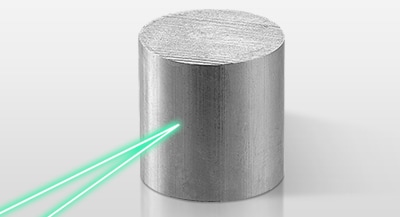
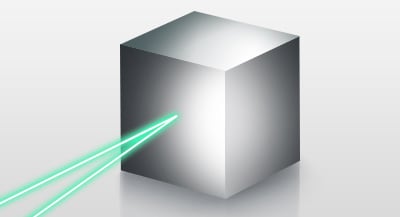
Spiegelnde Objekte neigen zur Spiegelreflexion von Licht. Wenn sich die Neigung des Objekts ändert, wird der in einer geraden Linie verlaufende Laserstrahl möglicherweise nicht richtig zum Empfänger reflektiert, was zu einer unzureichenden empfangenen Lichtintensität führt. Als Gegenmaßnahme sollten Sie bei Verwendung eines reflektierenden Lasers oder eines Lasermodells mit festem Erkennungsabstand das Objekt absichtlich in einer leicht geneigten Position erfassen. Alternativ visieren Sie einen nicht spiegelnden Teil des Objekts an, sofern vorhanden, um die Erkennung zu erleichtern. Sollte die Erkennung mit einem reflektierenden Laser oder einem Lasermodell mit festem Erkennungsabstand nicht möglich sein, wählen Sie ein Lichtschranken- oder retro-reflektierendes Modell. Diese Typen sind hinsichtlich der Oberflächenbeschaffenheit unempfindlicher. Wählen Sie einen Lichtleitersensor oder einen anderen Typ mit breiterer Streuung. Wenn das spiegelnde Objekt in einem Winkel vorbeigeführt wird, treten weniger Fluktuationen der empfangenen Lichtintensität auf.

In folgendem Dokument werden Beispiele zur Sensorauswahl sowie zur Behebung typischer Probleme, wie Fehlerekennungen durch die Objekte an sich oder die Umgebungsbedinungen vorgestellt. Diese nützlichen Tipps eignen sich nicht nur als Lektüre für bereits bestehende Anwendungen sondern auch für die effektive Planung zur Einführung von Lasersensorik.
![Modellreihe LV Weiterer Ausbau erfolgreicher Anwendungen mit Lasersensoren Bd.1 [SPOT]](/img/asset/AS_63246_L.jpg)
![Modellreihe LV Weiterer Ausbau erfolgreicher Anwendungen mit Lasersensoren Bd.2 [FLÄCHE]](/img/asset/AS_63247_L.jpg)
![LASER-LÖSUNGEN [AUSGABE FÜR DIE AUTOMOBILINDUSTRIE]](/img/asset/AS_69599_L.jpg)