Positionskorrektur
Verstehen Sie die Positionsanpassung, um bewegliche Objekte genau zu prüfen
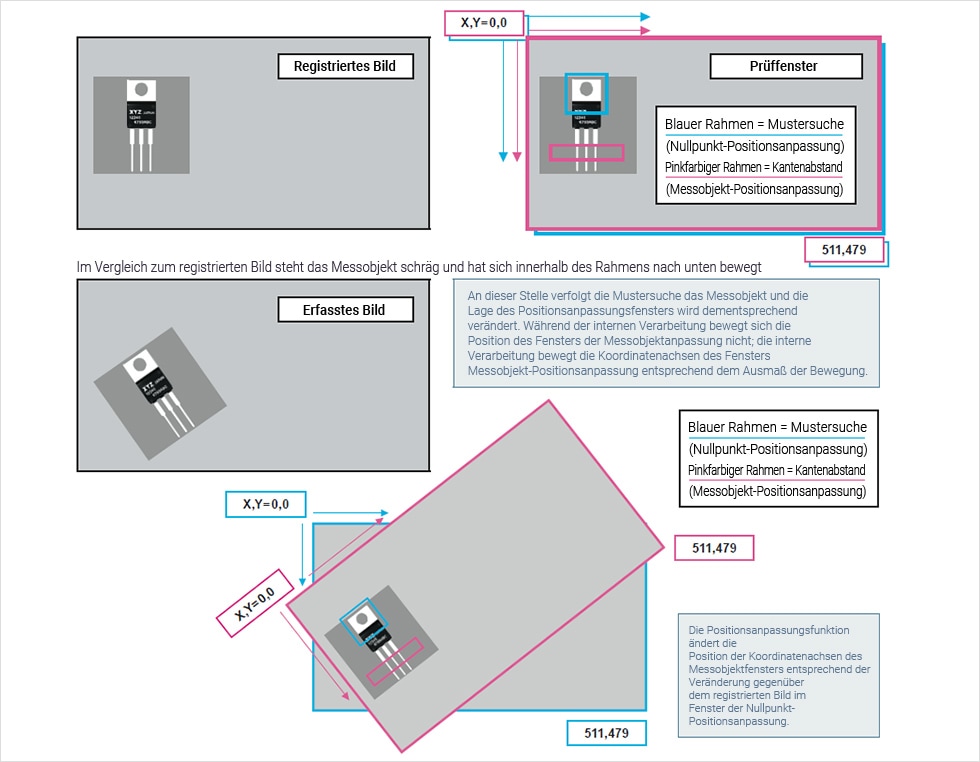
Die Positionsanpassung ist im Allgemeinen dann erforderlich, wenn Messobjekte an/auf einer Produktionslinie geprüft werden. Diese Funktion kombiniert das Fenster der Nullpunktanpassung (der Prüfrahmen, der die Verstellung berechnet) mit dem Fenster der Messobjektanpassung (der Prüfrahmen, der angepasst wird).

Prinzip der Positionsanpassung - Koordinatenachsen
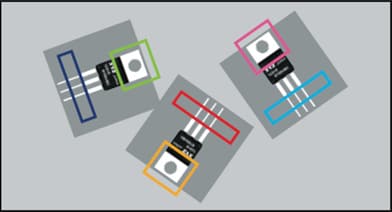
Beispiel: Die Abweichung vom Referenzbild an der Wärmeplatte (blauer Rahmen) einer dreipoligen Klemme wird für die Positionskorrektur im Fenster (rosa Rahmen) für die Überprüfung des Stiftabstands an den Kontaktenden (rosa Rahmen) verwendet.
Hinweis
Die Funktion der Positionsanpassung beinhaltet eine interne Verarbeitung, die die Koordinatenachsen des Fensters der Messobjektanpassung ändert. Einige Bereiche des Fensters der Nullpunktanpassung und des Fensters der Messobjektanpassung scheinen identisch zu sein, wenn sie auf dem Monitor betrachtet werden, doch sie geben verschiedene Standard-Koordinatenpunkte als gemessene Werte aus. Beim Berechnen zwischen Fenstern, die verschiedene Koordinatenachsen haben, verwenden die gemessenen absoluten Daten die linke obere Ecke des CCD als Nullpunkt.

Prinzip der Positionsanpassung - Drehpunkt
Die Positionsanpassung beinhaltet die Messung des Ausmaßes der Neupositionierung des Messobjektfensters in Beziehung zum registrierten, dem Referenzbild. Bei Daten zum Winkel ist die Wahl des Drehpunktes, der zur Veränderung des Winkels verwendet wird, extrem wichtig. Wenn die X- und Y-Koordinaten und der Winkel mithilfe der Mustersuche angepasst wurden, wird der Mittelpunkt des Musters zum Drehpunkt.
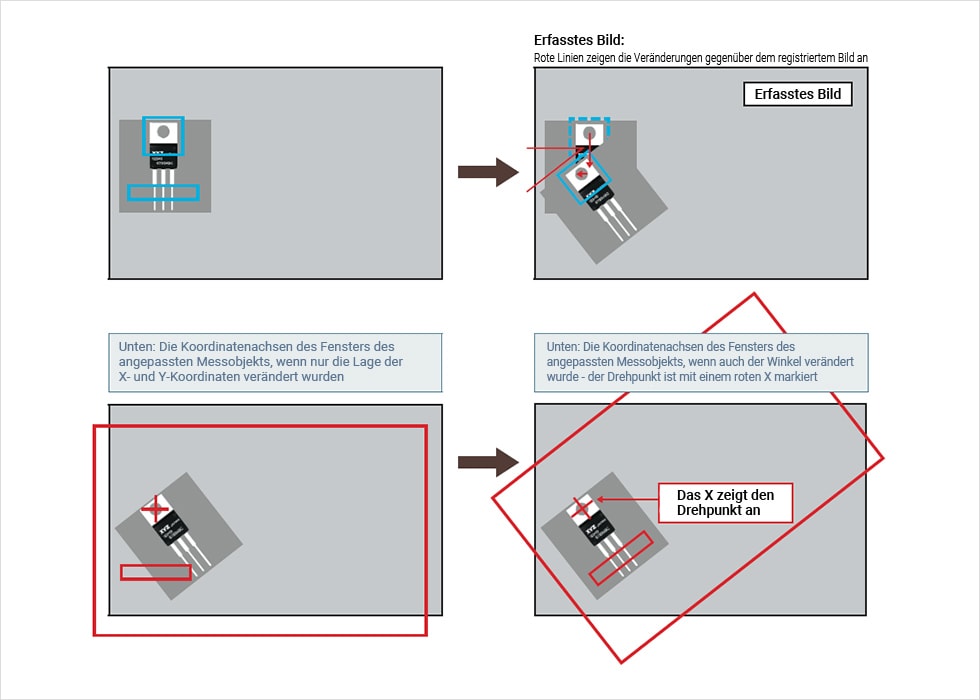
Wenn nur der Winkel und nicht der Drehpunkt festgelegt wird, fällt der Drehpunkt auf den Nullpunkt zurück (d.h. die linke obere Ecke wird als 0,0 eingestellt). Die Koordinatenachsen und das Messobjektfenster sind verstellt, wie mit dem rot gestrichelten Rahmen dargestellt. Wenn der Winkel angepasst wird, muss der Drehpunkt mitberücksichtigt werden. Die Endposition des Fensters zur Messobjekt-Positionsanpassung verändert sich stark entsprechend dem Punkt, der als Drehpunkt für die Winkelanpassung verwendet wird.
Hinweis
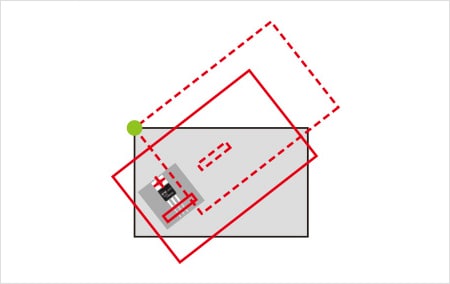
Für die Positionskorrektur eines Winkels muss auch der Drehmittelpunkt berücksichtigt werden.
Je nach gewähltem Drehmittelpunkt kann sich dabei das Ergebnis im Zielobjektfenster der Positionskorrektur erheblich unterscheiden.
Anhand der Koordinaten, die bei der Mustersuche für die Winkelmessung ermittelt wurden, wird der Winkel einwandfrei korrigiert.
Auch mit der reinen Berechnungsmethode kann der Winkel richtig korrigiert werden, wenn nicht nur der Winkel, sondern auch der Drehmittelpunkt in die Korrektur einfließen.
Prinzip der Positionsanpassung - individuelle Positionsanpassung mit der Mehrfachmustersuche
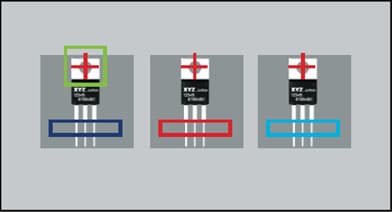
Das gleichzeitige Prüfen von drei identischen Messobjekten. In der Mustersuche ein Muster registrieren und die Anzahl auf 3 einstellen, um drei Muster gleichzeitig zu verfolgen. Dabei werden drei Prüffenster (dunkelblau, rot und hellblau) erzeugt und drei Kantenabstandsrahmen werden auf den jeweiligen Anschlusstiften positioniert.
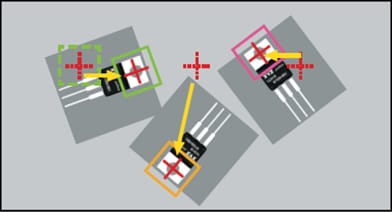
Auch wenn sich alle drei Objekte frei bewegen, wird ihnen eine Reihenfolge von links nach rechts zugeordnet, wenn sie sich entlang der X-Achse in aufsteigender Reihenfolge befinden. Die gelben Pfeile zeigen das Ausmaß der Anpassung gegenüber der Standardposition an.
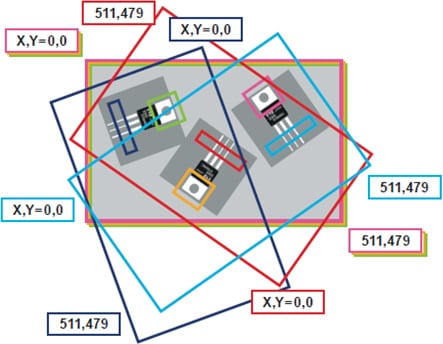
Der Positionsanpassungswert des dunkelblauen Rahmens wird dem grünen Rahmen entnommen, der Positionsanpassungswert des roten Rahmens dem gelben Rahmen und der Positionsanpassungswert des hellblauen Rahmens wird dem pinkfarbenen Rahmen entnommen. In der Abbildung rechts werden die Koordinatenachsen des dunkelblauen, roten und hellblauen Rahmens dargestellt.
Mit den CV-Bildverarbeitungssystemen von KEYENCE lassen sich zusätzlich zur Festlegung eines einzelnen Standardfensters und gleichzeitiger Anpassung aller anderen Fenster (Chargenanpassung) auch Positionsanpassungen zwischen einzelnen Fenstern (individuelle Anpassung) durchführen.
Die vier oben dargelegten Prozessschritte ermöglichen die Durchführung von hochpräzisen Kantenprüfungen mit hoher Beständigkeit gegenüber Schwankungen der Beleuchtungsintensität und sonstigen Störeinwirkungen. Wenn die Methode der Positionsanpassung angewendet wird (auch wenn nur ein Muster zur Nullpunktanpassung existiert), müssen Messobjektfenster mithilfe eine Mustersuche, die die Position der einzelnen Messobjekte ermittelt, erzeugt werden.
Übersicht über die Positionskorrektur-Methode, mit der auch ein bewegtes Objekt zuverlässig geprüft werden kann
Die folgenden Punkte bilden die Grundlage für die Positionskorrektur.
- Bei der Positionskorrektur wird die Abweichung zwischen den erkannten Positionen von Referenzbild und Aufnahme aus dem Fenster der Korrekturquelle auf das Korrekturziel-Fenster in Form einer Änderung der Koordinatenachsen übertragen.
- Für die Winkelkorrektur muss zusätzlich der Drehmittelpunkt in den Parametern berücksichtigt werden.
- Basiert die Positionskorrektur auf mehreren Detektionsergebnissen, ist zu berücksichtigen, dass sich die Koordinatenachsen in den jeweiligen Korrekturziel-Fenstern unterscheiden und dementsprechend der Bereich im Korrekturziel-Fenster festgelegt werden muss, obwohl das Muster der Korrekturquelle identisch ist.
[Referenz] Eine präzise Prüfung der Korrekturquelle ist die Grundvoraussetzung für eine exakte Positionskorrektur. Wie man die Parameter für die Mustersuche/Kantenposition exakt einstellt, finden Sie in den Abschnitten „Grundlagen der Dimensionsprüfung“ und „Grundlagen der Positionserkennung“.
Im nächsten Thema geht es um Bildaufbereitungsfilter.
Es gibt eine Reihe von unterschiedlichen Bildaufbereitungsfiltern wie den Vergrößerungs- und den Mittelwertfilter, die zur Stabilisierung der Messergebnisverarbeitung eingesetzt werden.
Um diese Filter korrekt nutzen zu können, ist eine grundlegende Kenntnis ihrer Funktionsprinzipien erforderlich. Im Folgenden möchten wir Ihnen das Funktionsprinzip und einige Anwendungsbeispiele im Detail vorstellen.


![Technikgeschichte Der Bildverarbeitung Band 1 [Kamera]](/img/asset/AS_63138_L.jpg)
![Die neuesten Anwendungsbeispiele aus der Bildverarbeitung [Automotive]](/img/asset/AS_72922_L.jpg)

![Die neuesten Prüfungen mithilfe Bildverarbeitung [Lebensmittelindustrie und Pharmaindustrie]](/img/asset/AS_73109_L.jpg)
![Die neuesten Prüfungen mithilfe Bildverarbeitung [Elektronikbauteile & Elektronikgeräte]](/img/asset/AS_87575_L.jpg)






