Erkennung basiert auf „Lichtmenge“
Merkmale bildbasierter Höhenvergleichssensoren
Manchmal kommt es vor, dass Sensoren nicht direkt über dem zu überprüfenden Bauteil montiert werden können und Position wie auch Neigung von Bauteil zu Bauteil variieren. Durch die Verwendung einer Kamera mit integriertem Lasersensor können nun mit einem einzigen Gerät verschiedene Erkennungsprobleme durch Nutzung von Funktionen wie Neigungskorrektur, Positionskorrektur und Echtzeit-Korrektur der Bauteilneigung gelöst werden.

Merkmale
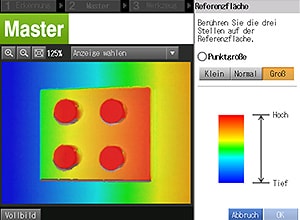
Neigungskorrektur

Wenn der Sensorkopf oder das Objekt geneigt sind, korrigiert diese Funktion den Winkelversatz. Durch die Registrierung einer Bezugsebene können stabile Höhenkontrollen durchgeführt werden.
Vor der Neigungskorrektur
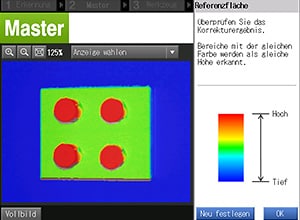
Nach der Neigungskorrektur
Positionskorrektur

Eine stabile Erkennung ist möglich, ohne die Position oder Ausrichtung des Objekts anpassen zu müssen. Diese Korrektur in Echtzeit macht eine zusätzliche Führung oder Zentrierung überflüssig, was Zeit und Geld spart.
Vor der Positionskorrektur

Nach der Positionskorrektur

Neigungskorrektur in Echtzeit

Selbst bei einer Neigung des Zielobjekts kann der Neigungswinkel für den entsprechenden Punkt korrigiert werden. Da die Korrektur auf jede einzelne Höhenüberprüfung angewandt wird, ist eine stabile Höhenerkennung möglich.
Ohne Neigungskorrektur in Echtzeit

Mit Neigungskorrektur in Echtzeit


-
Erkennung basiert auf „Lichtmenge“
Was ist ein bildbasierter Höhenvergleichssensor?
Lasersensoren: Bildbasierter Höhenvergleichssensor -
Erkennung basiert auf „Lichtmenge“
Was ist ein Farbsensor?
Farbsensoren






