
Optimierung der Trajektoriemessung für Transfermaschinen und Industrieroboter

Die digitale Transformation der Fertigungs- und Logistikindustrie hat zur Automatisierung der Arbeit in Produktionsstätten und Logistikzentren geführt. Ein typisches Beispiel für diese Automatisierung ist die Einführung von Transfermaschinen und Industrierobotern, Geräte, die heute als unverzichtbar gelten.
Es gibt jedoch Fälle, in denen Engpässe durch die ungenaue Arbeit dieser Geräte oder deren Unfähigkeit, mit der Liniengeschwindigkeit Schritt zu halten, entstehen.
Die Hauptursache für diese Probleme ist eine unzureichende Betriebsgenauigkeit. Durch die Messung der Trajektorien der beweglichen Teile lassen sich die Probleme identifizieren.
In diesem Abschnitt werden die Grundkenntnisse der Trajektoriemessung für Transfermaschinen und Industrieroboter, die Notwendigkeit dieser Messung und die Messpunkte erläutert. Außerdem werden verschiedene Beispiele für die Optimierung dieser Messungen vorgestellt, wobei der Schwerpunkt auf den Unterschieden in der Effizienz der Messungen liegt, die sich aus den verschiedenen Messgeräten ergeben.
- Was ist die Trajektorie einer Transfermaschine oder eines Industrieroboters?
- Trajektorieeigenschaften
- Notwendigkeit der Trajektoriemessung für Transfermaschinen und Industrieroboter
- Trajektoriemessung für Transfermaschinen und Industrieroboter
- Probleme der Trajektoriemessung für Transfermaschinen und Industrieroboter und Industrieroboter und ihre Lösungen
- Optimierung der Trajektoriemessung für Transfermaschinen und Industrieroboter

Was ist die Trajektorie einer Transfermaschine oder eines Industrieroboters?

Die Trajektorie einer Transfermaschine oder eines Industrieroboters bezieht sich auf den Weg, den die Roboterhand und die Gelenke während des Betriebs des Industrieroboters oder der beweglichen Teile der Transfermaschine nehmen.
In Lagerhäusern, Produktionsstätten und an ähnlichen Orten leisten Transfermaschinen und Industrieroboter exzellente Arbeit bei präzisen, sich wiederholenden Aufgaben. Der Betrieb mit der vorgegebenen Geschwindigkeit und die Positioniergenauigkeit sind die wichtigsten Merkmale, wenn es um diese präzise, sich wiederholende Arbeit geht. Um diese beiden Funktionen zu realisieren, müssen sich Elemente wie die beweglichen Teile der Transfermaschine und die Roboterhand und Gelenke des Industrieroboters auf der richtigen Trajektorie bewegen.
Trajektorieeigenschaften
Die Trajektorieeigenschaften variieren je nach Gerät. In diesem Abschnitt werden die Trajektorieeigenschaften von vertikalen Transfermaschinen und vertikalen Multigelenkrobotern aufgezeigt.
Trajektorie der Transfermaschine
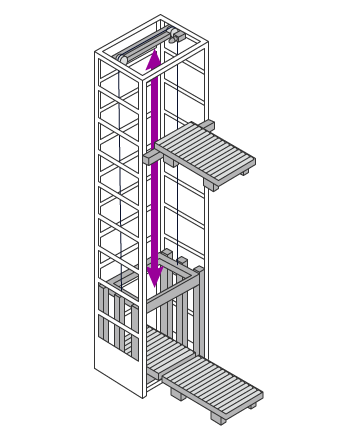
Es gibt viele Arten von Transfergeräten, darunter Hebevorrichtungen, Förderbänder und fahrerlose Transportsysteme. Eine dieser Vorrichtungen ist die vertikale Transfermaschine, die eine lange Bewegungsstrecke hat und eine hohe Geradheit erfordert, um den normalen Betrieb des auf- und absteigenden Fahrkorbs aufrechtzuerhalten.
Eine vertikale Transfermaschine ist ein Gerät, das in Gebäuden wie Logistikzentren und Produktionsstätten installiert wird, um Lasten vertikal zu transferieren. Sie unterscheidet sich von einem Lastenaufzug dadurch, dass sie nicht den im japanischen Baunormengesetz vorgeschriebenen Aufzugssystemen entspricht und daher keinen Antrag auf Baubestätigung, keine Genehmigung des Arbeitsnormenbüros, keine regelmäßigen Inspektionen und Berichte nach der Installation oder Ähnliches erfordert. Da sie auf den Transport von Lasten spezialisiert ist, kann sie dies mit höherer Geschwindigkeit tun und bildet so ein effizientes Transfersystem in Kombination mit Transfermaschinen für die Lagerung und den Versand. Daher werden viele dieser Maschinen in Logistikzentren, Produktionsstätten und ähnlichen Orten aufgestellt.
Eine vertikale Transfermaschine bewegt sich in einer Geraden und mit konstanter Geschwindigkeit auf und ab. Außerdem können Typen, deren Antriebsmechanismen mit Servomotoren ausgestattet sind, sanft beschleunigen und abbremsen, was die Anhaltezeit sowie die Belastung des transportierten Objekts und der mechanischen Vorrichtungen reduziert. Es ist sogar möglich, diese Maschinen zu stoppen, bevor der Käfig einen der Endpunkte erreicht.
Von diesen Operationen führen vertikale Transfermaschinen nicht nur lineare Operationen über lange Strecken durch, sondern zeichnen auch verschiedene Trajektorien, wie z. B. das Anhalten vor dem Erreichen eines der Endpunkte.
Trajektorie eines Industrieroboters
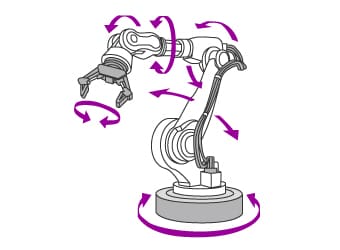
Es gibt viele Arten von Industrierobotern, darunter vertikale Multigelenkroboter, horizontale Multigelenkroboter (SCARA-Roboter) und kartesische Roboter. Vertikale Multigelenkroboter sind wie der menschliche Arm geformt und verfügen über einen hohen Grad an Bewegungsfreiheit, der es der Roboterhand und den Gelenken ermöglicht, sich auf komplizierten Bahnen zu bewegen.
Die meisten vertikalen Multigelenkroboter sind 6-achsige Geräte, die für die Arbeit in dreidimensionalen Räumen benötigt werden. Jedes Gelenk (auch als Achse bezeichnet) verfügt über einen eingebauten Servomotor, der komplizierte und gleichmäßige Bewegungen ermöglicht, was ein sehr hohes Maß an Vielseitigkeit bietet. Daher werden diese Roboter in einer Vielzahl von Prozessen eingesetzt, einschließlich Kommissionierung, Schweißen, Beschichtung und Montage. Allerdings ist ihre Struktur komplexer und ihre mechanische Steifigkeit geringer als bei kartesischen Robotern und ähnlichen Geräten, sodass es bei Hochgeschwindigkeitsoperationen leicht zu Überschwingungen und Vibrationen kommen kann, was eine präzise Steuerung erforderlich macht.
Wie hier beschrieben, bewegen sich vertikale Multigelenkroboter, deren filigrane Mechanismen eine größere Bewegungsfreiheit ermöglichen, durch die kompliziertesten Bahnen einer Vielzahl von Industriemaschinen.
Notwendigkeit der Trajektoriemessung für Transfermaschinen und Industrieroboter
Die Betriebstrajektorien von Transfermaschinen und Industrierobotern ändern sich in Abhängigkeit von Faktoren wie der Belastung durch das zu transferierende Produkt, der Reibung zwischen den Bauteilen und der Verschlechterung der elektromagnetischen Bremse des Motors. Diese Veränderungen wirken sich auf unterschiedliche negative Weise auf die von diesen Geräten ausgeführte Arbeit aus.
Nehmen wir zum Beispiel eine vertikale Transfermaschine, die das von einem Förderband übernommene Produkt an der richtigen Stelle in den aufsteigenden/absteigenden Käfig lädt, zur oberen/unteren Ebene fährt und das Produkt dann auf die nächste Förderanlage entlädt. Je schwerer das zu transferierende Produkt wird, desto größer wird die Belastung des Motors, sodass die vertikale Transfermaschine nicht auf der idealen Trajektorie agieren kann. Infolgedessen verschlechtert sich die elektromagnetische Bremse, was dazu führt, dass die Maschine nicht mehr in der Lage ist, an der richtigen Position anzuhalten. Außerdem führen Verzerrungen der Führungsschiene zu einer Instabilität der Trajektorie.
Wenn bei Industrierobotern, die Produkte automatisch greifen und transportieren, die Leistung der in den Gelenken installierten Motoren oder die Steifigkeit des Arms unzureichend ist, wird die Trajektorie der Roboterhand, des Arms oder der Gelenke instabil, was zu längeren Positionierungs- und Taktzeiten führt und eine genaue Kommissionierung und Palettierung unmöglich macht.
Die Betriebsgenauigkeit von Transfermaschinen und Industrierobotern wird durch verschiedene Faktoren beeinflusst, darunter die Leistung der Motoren und die Festigkeit des Rahmens, des Arms und der Gelenke, aus denen diese Geräte bestehen. Daher ist es sehr schwierig, die Ursachen von Problemen bei der Betriebsgenauigkeit zu erkennen. Durch die Genauigkeitsmessung der Trajektorie ist es jedoch möglich, die Ursachen von Problemen wie diesen schnell zu erkennen. Regelmäßige Messungen können Veränderungen im Betriebszustand der Geräte deutlich machen und ermöglichen so eine vorbeugende und vorausschauende Wartung von Transfermaschinen und Industrierobotern.
Trajektoriemessung für Transfermaschinen und Industrieroboter
Bei diesen Messungen ist das Messobjekt die Trajektorie, die von den beweglichen Teilen in der Luft vollzogen wird. Daher sind andere Dinge zu beachten als bei der Messung der Abmessungen von allgemeinen Produkten.
Messpunkte
Die Messpunkte für Trajektorien sind bei Transfermaschinen und Industrierobotern unterschiedlich. In diesem Abschnitt werden die Messpunkte anhand der Beispiele einer vertikalen Transfermaschine und eines vertikalen Multigelenkroboters vorgestellt.
Vertikale Transfermaschine
Bei einer vertikalen Transfermaschine wird die Trajektorie des auf-/abwärts fahrenden Käfigs gemessen. Eine Messung, ob die Förderanlage oder der Paketständer im Käfig geradlinig aufsteigt und an der richtigen Stelle anhält, ermöglicht eine Überprüfung der Arbeitsgenauigkeit.
Eine unzureichende Leistung des Antriebsmotors führt zu einem Nachlauf im unteren Bereich. Eine Verschlechterung der elektromagnetischen Bremse des Motors führt zu einem Nachlauf im oberen Teil und führt dazu, dass der Käfig in der falschen Position zum Stehen kommt. Außerdem führen Verformungen der Führungsschienen zu einer Instabilität der Trajektorie des auf-/abwärts fahrenden Käfigs.
Diese Beschreibung zeigt, wie wichtig es für vertikale Transfermaschinen ist, die oberen und unteren Anschlagpositionen sowie die Trajektorie der Förderanlage oder des Paketständers im auf-/abwärts fahrenden Käfig bei dessen vertikaler Bewegung zu messen.
Vertikaler Multigelenkroboter
Bei einem Industrieroboter werden die Trajektorien der Roboterhand und der Gelenke gemessen. Mit diesen Messungen lassen sich unter anderem die motorische Leistung und die Armsteifigkeit überprüfen.
Da jedes Gelenk eines Industrieroboters mit einem Motor ausgestattet ist, ist die Schwierigkeit, die Arbeitsgenauigkeit proportional zur Anzahl der Gelenke zu erreichen. Roboter wie z. B. 6-achsige Multigelenkroboter verfügen über zahlreiche Motoren, sodass selbst kleine Fehler im Betrieb dieser Motoren die Trajektorien stören. Außerdem führt eine unzureichende Steifigkeit des Arms zu Vibrationen während des Betriebs, da die Last nicht vollständig abgestützt werden kann, was die Durchführung der programmierten Operationen erschwert. Darüber hinaus haben diese Probleme einen großen Einfluss auf die Positionierungsgenauigkeit, die wichtig ist, wenn die Roboterhand Arbeiten wie Greifen und Bearbeiten ausführt.
Daher müssen die Trajektorien und Haltepositionen der Roboterhand und der Gelenke eines Industrieroboters gemessen werden.
Probleme der Trajektoriemessung für Transfermaschinen und Industrieroboter und Industrieroboter und ihre Lösungen

Die Trajektorien von Transfermaschinen und Industrierobotern müssen nicht nur während der Installation und des Einlernens, sondern auch während der regelmäßigen Wartung nach der Installation überprüft werden. Für die Trajektorie einer Transfermaschine oder eines Industrieroboters wird die Bewegung der beweglichen Teile, Aktoren oder Gelenke gemessen. Die Trajektorien von linearen Bewegungen werden mit Handmessmitteln wie Messuhren gemessen. Dreidimensionale Trajektorien werden mit 3D-Koordinatenmessgeräten wie z. B. Laser-Trackern gemessen.
Es müssen jedoch viele Punkte gemessen werden, sodass die Messung mit Handwerkzeugen viel Zeit in Anspruch nimmt. Außerdem hängt die Genauigkeit der Messungen stark von den Fähigkeiten der Bediener ab, die die Messungen durchführen. Es gibt auch das grundsätzliche Problem, dass es schwierig ist, dreidimensionale Trajektorien zu messen.
Laser-Tracker können dreidimensionale Messungen durchführen, sind aber aufgrund der für ihre Bedienung erforderlichen Fähigkeiten nur für eine begrenzte Anzahl von Bedienern geeignet. Es gibt viele Fälle, in denen solche Probleme bei der Trajektoriemessung zu Verzögerungen bei der Inbetriebnahme der Fertigungslinie und zu Fehlfunktionen nach der Installation der Fertigungslinie führen.
Um diese Probleme zu lösen, werden in immer mehr Fällen die neuesten 3D-Koordinatenmessgeräte eingesetzt.
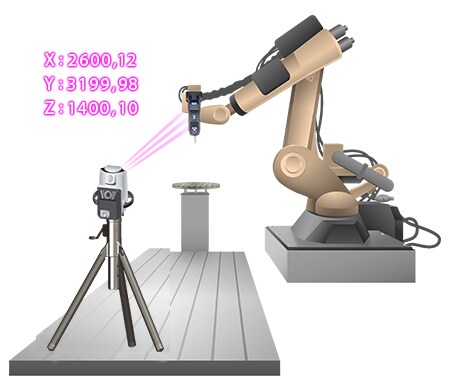
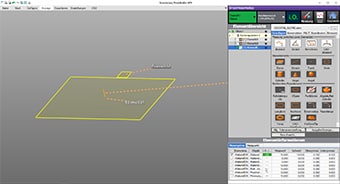
Das Mobile 3D-Koordinatenmessgerät der Modellreihe WM von KEYENCE kann hochpräzise Messungen durchführen, indem es die Position des angebrachten, kabellosen Messtasters am gewünschten Messpunkt abliest.
Innerhalb des Messbereichs ist eine einfache Messung durch eine einzelne Person möglich, selbst wenn eine Transfermaschinentrajektorie mit einer langen linearen Strecke oder die dreidimensionale Trajektorie der Roboterhand eines Industrieroboters gemessen wird. Außerdem variieren die Messergebnisse im Gegensatz zu Handmessmitteln nicht, was eine quantitative Messung ermöglicht. Die Messdaten werden sofort gespeichert, sodass ein Vergleich mit den Entwurfsdaten möglich ist und diese für das Qualitätsmanagement bereitgestellt werden können.


Messung der Trajektorieverzerrung einer Transfermaschine
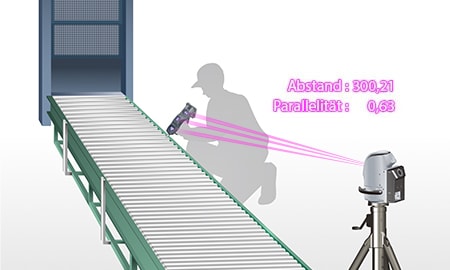
Um die Trajektorieverzerrung der Transfermaschine mit einer Messuhr, einem Laserentfernungsmesser oder einem ähnlichen Gerät zu messen, muss die Transfermaschine an der zu messenden Position angehalten werden. Die Messgenauigkeit ist proportional zur Anzahl der zu messenden Positionen, sodass eine enorme Anzahl von Anschlägen notwendig ist, wenn eine hohe Genauigkeit erforderlich ist.
Außerdem variiert der gemessene Wert je nach der zu messenden Position und der Art und Weise, wie das Messgerät an das Messobjekt herangeführt wird, sodass eine genaue Messung Kenntnisse und Techniken für Messmethoden, die Handhabung von Messgeräten und ähnliche Themen erfordert. Daher erfordert die Messung der Trajektorieverzerrung von Transfermaschinen mit einer Messuhr, einem Laserentfernungsmesser oder einem ähnlichen Gerät einen enormen Zeitaufwand und qualifizierte Mitarbeiter.
Der kabellose Messtaster der Modellreihe WM kann am beweglichen Teil der Transfermaschine angebracht werden und ermöglicht so eine Messung der Trajektorie durch einfaches Ablesen der Trajektorie dieses Messtasters. Der große Messbereich ermöglicht eine einfache, hochpräzise Messung von langen Trajektorien durch eine einzelne Person. Anhand der gewonnenen Daten können Probleme wie der Verzug von Führungsschienen und Verzerrungen überprüft werden. Die dreidimensionalen Koordinaten jedes Punktes können ebenfalls gemessen werden, was die Messung der Geradheit und Parallelität der Trajektorie ermöglicht.
Außerdem speichert die Modellreihe WM die Messergebnisse sofort als Daten, sodass die aus einer 3D-CAD-Datei gelesene Trajektorie mit der Trajektorie im Programm verglichen und die Messergebnisse als CAD-Daten ausgegeben werden können.

Die Tracking-Kamera der Modellreihe WM verfolgt den Messtaster, um seine Position und Ausrichtung mit hoher Genauigkeit zu bestimmen. Die Positions-Kamera verfolgt das von der kabellosen Sonde ausgestrahlte Licht zu jeder Zeit. Daher kann die Position des Messtasters sofort erkannt werden, egal wo sich der Messtaster innerhalb des großen Messbereichs befindet.

- A
- Tracking-Kamera
- B
- Positions-Kamera
- C
- Drahtloser Messtaster
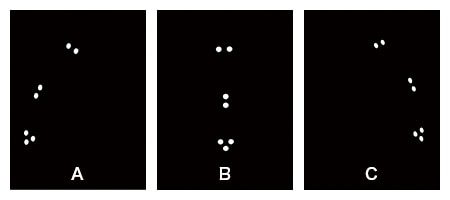
- A
- Nach links geneigt
- B
- Mitte
- C
- Nach rechts geneigt
Trajektorienmessung für Industrieroboter
Die Messung der Halteposition und der Trajektorie der Roboterhand eines Industrieroboters mit einem Laser-Tracker oder einem ähnlichen Instrument erfordert umfangreiche Kenntnisse über das Messinstrument und die Messmethode. Aufgrund der für ihre Bedienung erforderlichen Fähigkeiten können diese Instrumente nur von einer begrenzten Anzahl von Bedienern verwendet werden. Außerdem ist es schwierig, die dreidimensionalen Trajektorien von Industrierobotern mit Handmessmitteln wie Messuhren zu messen.
Der kabellose Messtaster der Modellreihe WM kann an der Roboterhand angebracht werden und ermöglicht so eine Messung der Trajektorie durch einfaches Ablesen der Trajektorie dieses Messtasters. Sogar die dreidimensionalen Trajektorien eines 6-achsigen vertikalen Multigelenkroboters lassen sich problemlos von einer Person messen. Trajektorien können mit vom Benutzer eingestellten virtuellen Linien und Referenzkoordinaten gemessen werden. Die Auto-Trigger-Funktion kann verwendet werden, um eine Trajektorie als aufeinanderfolgende Punktwolkendaten zu erfassen.
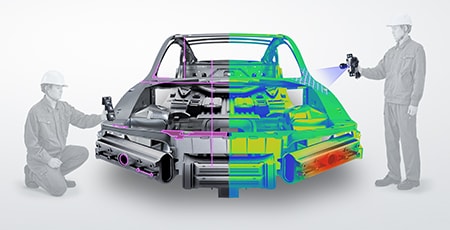
Darüber hinaus ist die Modellreihe WM tragbar und erfüllt damit die Anforderung, die 3D-Montagegenauigkeit vor Ort zu messen, was mit herkömmlichen 3D-Koordinatenmessgeräten nicht möglich ist.

- 1
- Transportieren: Die Modellreihe WM wird mit einem eigenen Rollkoffer geliefert.
- 2
- Aufstellen: Setzen Sie das WM einfach auf das Stativ.
- 3
- Messen: Sofort einsatzbereit.
Optimierung der Trajektoriemessung für Transfermaschinen und Industrieroboter
Die Modellreihe WM ermöglicht die Messung der Trajektorien von Transfermaschinen und Industrierobotern durch eine einzelne Person und durch einfaches Antasten mit dem kabellosen Messtaster am Messpunkt. Zusätzlich zu den oben vorgestellten Leistungsmerkmalen bietet die Modellreihe WM folgende Vorteile:
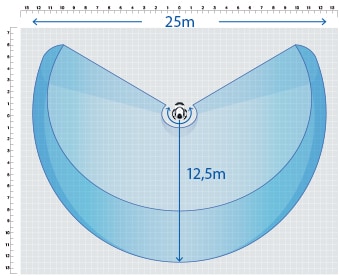
- Hochpräzise Messung über einen großen Bereich
- Ein großer Messbereich bis zu 25 m kann mit hoher Genauigkeit gemessen werden. Die Modellreihe WM ist mit dem Navigationsmessmodus ausgestattet, der die Messung am selben Punkt nach einem gespeicherten Messverfahren ermöglicht, sodass jeder die gleichen Messdaten erhalten kann.
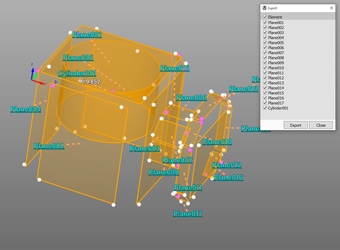
- Messergebnisse können als 3D-Modell ausgegeben werden.
- Gemessene Elemente können als STEP/IGES-Datei exportiert werden. 3D-CAD-Daten können auf der Grundlage der Messergebnisse eines tatsächlichen Produkts erstellt werden, auch wenn keine Zeichnung vorhanden ist.
- Leicht verständliche Schnittstelle
- 3D-Koordinatenmessgeräte arbeiten oft mit komplizierten und ungewohnten Befehlen. Die Modellreihe WM bietet eine intuitive und für jeden leicht verständliche Bedienung mit Bildern und Symbolen.
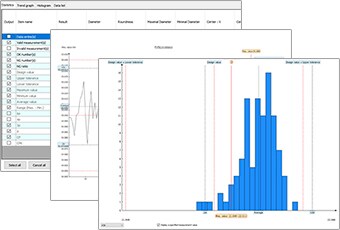
- Statistische Auswertungen zur Zusammenfassung der Daten
- Messergebnisse von geführten Messungen werden automatisch auf der Festplatte gespeichert. Die gespeicherten Daten können dann für verschiedene statistische Analysen extrahiert werden, z. B. für die Überprüfung der statistischen Werte, Trendgrafiken und Histogramme.
Die Modellreihe WM unterstützt in hohem Maße die Analyse, z. B. den Vergleich mit 3D-CAD-Daten, sowie die Messung der Trajektorien von Transfermaschinen und Industrierobotern. Sie verbessert die Effizienz der Arbeit erheblich, einschließlich der Herstellung von Transfermaschinen und Industrierobotern sowie deren Betriebskontrollen, Einweisung und Wartung nach der Installation.
